Lab 08 - Tworzenie węzłów i przetwarzanie wiadomości
Tworzenie węzłów i przetwarzanie wiadomości

Konfiguracja środowiska
Przed rozpoczęciem pracy z ROS, w każdym nowo otwartym terminalu należy wywołać komendę:
- po pierwszej kompilacji (istnieją katalogi
build,install,log):
source install/setup.bash- przed pierwszą kompilacją:
source /opt/ros/humble/setup.bashWprowadzenie
W tej instrukcji będziemy tworzyć węzły subskrybujące i publikujące różne typy wiadomości. Dodatkowo zintegrujemy bibliotekę OpenCV do pracy z ROS'em i wykorzystamy ją do sterowania robotem mobilnym.
Tworzenie węzłów
Utworzenie paczki
Przejdź do katalogu ~/ros2_ws/src. Utwórz paczkę o nazwie camera_subscriber o zależnościach cv_bridge python3-opencv sensor_msgs geometry_msgs. Jako --build-type podaj ament_python.
ros2 pkg create camera_subscriber --build-type ament_python --dependencies cv_bridge python3-opencv sensor_msgs geometry_msgsTworzenie węzła
Węzły mogą być tworzone wraz z paczką komendą ros2 pkg create, jednak w tym miejscu utworzymy węzeł manualnie. Ta metoda sprawdzi się również, gdy będziesz chciał dodać węzeł do już istniejącej paczki.
- Przejdź do katalogu
~/ros2_ws/src/camera_subscriber/camera_subscriber. - Utwórz skrypt poleceniem
touch camera_node.py. - Wklej do skryptu poniższy kod.
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
def main(args=None):
rclpy.init(args=args)
node = Node('camera_node')
node.get_logger().info('Camera node started')
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()- W pliku
setup.pyprzeprowadź następującą modyfikację
entry_points={
'console_scripts': [
'camera_node = camera_subscriber.camera_node:main',
],
},- Zbuduj środowisko poleceniem
colcon buildbędąc w głównym katalogu. - Uruchom węzeł poleceniem:
ros2 run camera_subscriber camera_nodeW powyższym procesie istotne jest prawidłowe umiejscowienie skryptu (punkty 1,2) oraz dodanie pliku wykonywalnego w entry_points (punkt 4). Ważną uwagą jest również konieczność zbudowania środowiska, aby zaobserwować zmiany w działaniu programu (punkt 5) - niezależnie czy programujemy w Pythonie, czy w języku kompilowanym (np. C++).
Biblioteka rclpy (ROS Client Library for the Python) zawiera implementacje konceptów związanych z ROS'em. Dokumentacja jest dostępna tutaj.
Dodawanie subskrybenta
Otwórz plik camera_node.py i wklej do niego poniższą zawartość.
#!/usr/bin/env python3
import rclpy # Python Client Library for ROS 2
from rclpy.node import Node # Handles the creation of nodes
from sensor_msgs.msg import Image # Image is the message type
from cv_bridge import CvBridge # ROS2 package to convert between ROS and OpenCV Images
import cv2 # Python OpenCV library
def listener_callback(image_data):
# Convert ROS Image message to OpenCV image
cv_image = CvBridge().imgmsg_to_cv2(image_data,"bgr8")
# Display image
cv2.imshow("camera", cv_image)
# Stop to show the image
cv2.waitKey(1)
def main(args=None):
rclpy.init(args=args)
# Create the node
node = Node('camera_node')
# Log information into the console
node.get_logger().info('Hello node')
# Create the subscriber. This subscriber will receive an Image
# from the image_raw topic. The queue size is 10 messages.
subscription = node.create_subscription(Image,'image_raw',listener_callback,10)
# Spin the node so the callback function is called.
rclpy.spin(node)
# Spin the node so the callback function is called.
rclpy.shutdown()
if __name__ == '__main__':
main()💡 Uwaga! W przypadku braku wymaganych zależności do uruchomienia projektu (python3-opencv lub ros-humble-cv-bridge) skorzystaj z rosdep:
rosdep install --from-paths src -y --ignore-src --rosdistro humbleZależności te zostały zdefiniowane w momencie tworzenia paczki.
Przedstawiony kod tworzy subskrybenta tematu /image_raw, który może być uzyskany np. przy pomocy paczki usb_cam. W wywołaniu zwrotnym subskrybenta, funkcji listener_callback, dokonywana jest konwersja obrazu z ROS'owego typu Image na typ obsługiwany przez bibliotekę OpenCV oraz wyświetlanie klatek z kamery. Dokumentacja metody do tworzenia subskrybentów (create_subscription) znajduje się tutaj.
Węzły w wersji obiektowej oraz węzeł publikujący
Dokumentacja ROS2 dotycząca tworzenia węzłów wskazuje metodę obiektową jako domyślną dla tworzenia węzłów. Tworzenie kodu skalowalnego i modułowego, często w zespole, jest domeną programowania obiektowego. Poniżej przedstawiono schemat kodu, który można wykorzystać do tworzenia węzłów obiektowo.
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
class MyCustomNode(Node):
def __init__(self):
super().__init__("node_name")
def main(args=None):
rclpy.init(args=args)
node = MyCustomNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == "__main__":
main()Rozbudowywanie funkcjonalności węzła odbywa się poprzez dodawanie funkcjonalności w klasie MyCustomNode.
Przykład węzła publikującego
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher_ = self.create_publisher(String, 'topic_name', 10)
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = 'Hello World: %d' % self.i
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
self.i += 1
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
rclpy.shutdown()
if __name__ == '__main__':
main()Rozpoczynając od definicji konstruktora klasy, super().__init__ wewnętrznie wywołuje konstruktor klasy Node oraz nadaje nazwę węzłowi, w tym przypadku minimal_publisher. Metoda create_publisher tworzy obiekt publikujący wiadomości typu String (importowane z biblioteki std_msgs.msg) na temacie topic_name. Dodatkowo wartość 10 podana jako argument tej funkcji oznacza, tak jak w przykładzie z subskrybentem, rozmiar bufora równy tej wartości. W przypadku, gdy subskrybent nie nadąża z przetwarzaniem wiadomości, będą one odrzucane po przekroczeniu rozmiaru bufora.
Następnie tworzony jest timer z wywołaniem zwrotnym wykonującym się co 0.5 sekundy. Zmienna self.i jest inkrementowanym licznikiem. Funkcja timer_callback tworzy wiadomość zawierającą stan licznika, wyświetla go w konsoli przy pomocy metody get_logger().info i publikuje na temacie.
💡 Uwaga! Węzeł może jednocześnie zawierać obiekt publikujący i subskrybujący.
Przykład węzła subskrybującego znajduje się w dokumentacji.
Węzły w różnych językach programistycznych
ROS2 Client Libraries to interfejs API, który, umożliwia użytkownikom implementację kodu ROS. Korzystając z Client Libraries, deweloperzy kodu uzyskują dostęp do konceptów, takich jak węzły, tematy, serwisy itp. Client Libraries są dostępne w różnych językach programowania, dzięki czemu użytkownicy mogą pisać ROS'owy kod w języku, który najlepiej pasuje do ich aplikacji. Na przykład możesz chcieć napisać narzędzia do wizualizacji w Pythonie, ponieważ przyspiesza to prototypowanie, podczas gdy wydajne węzły mogą być zaimplementowane w C++.
Przykładowy szablon dla tworzenia węzła obiektowego dla języka C++:
#include "rclcpp/rclcpp.hpp"
class MyCustomNode : public rclcpp::Node
{
public:
MyCustomNode() : Node("node_name")
{
}
private:
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<MyCustomNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}Węzły napisane w różnych językach programistycznych nadal mogą się komunikować, ponieważ są budowane na wspólnym interfejcie rcl (ROS2 Client Libraries).
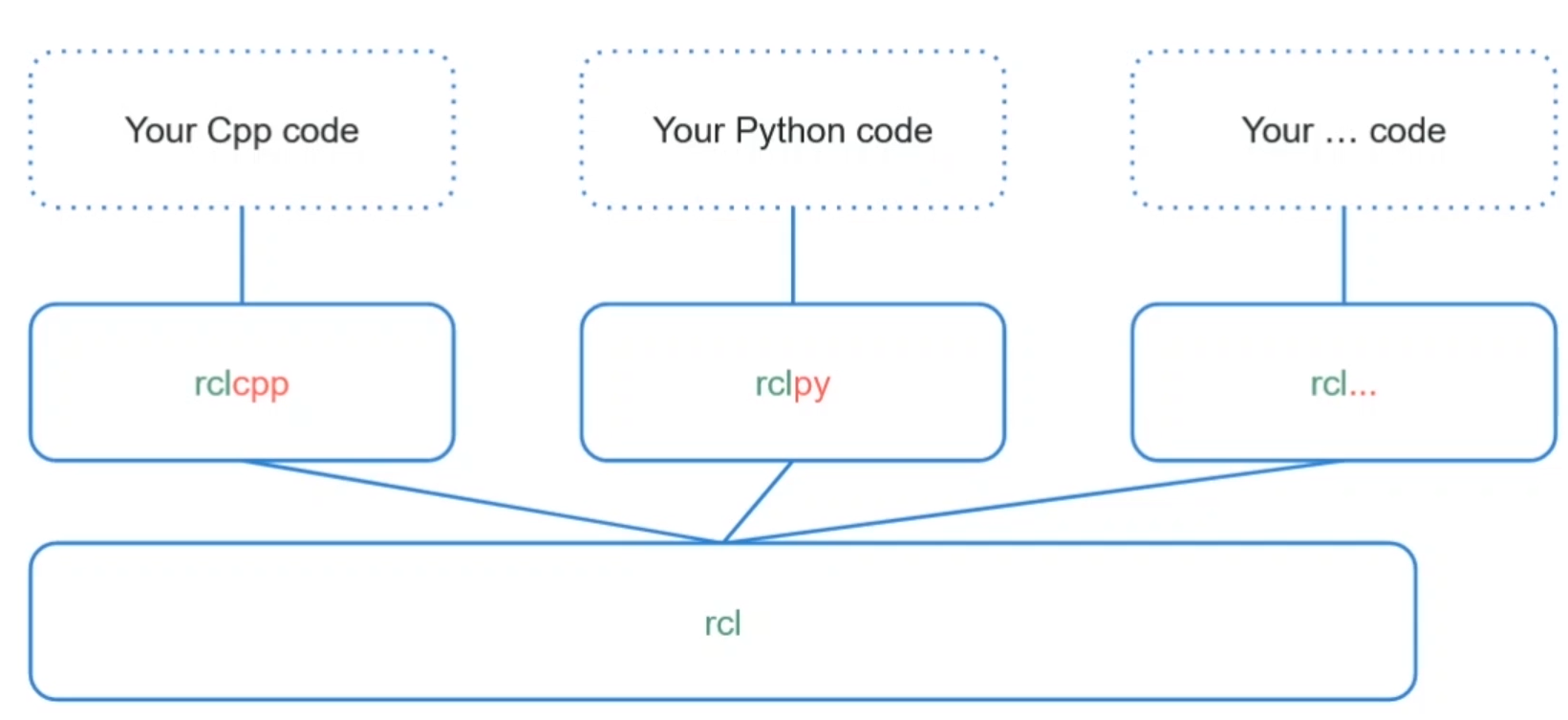
Funkcjonalności ROS'a dla C++(rclcpp) i Pythona (rclpy) są zarządzane i wspierane przez autorów i zespoły ROS'a. Natomiast są również inne języki, dla których funkcjonalności tworzy społeczność ROS'a (np. Rust, Node.js, C, Android). Więcej informacji tutaj.
Parametryzacja węzłów obiektowych
Dodawanie parametrów do węzła
Tworzenie parametrów w węźle odbywa się z wykorzystaniem metody self.declare_parameter('my_parameter', 'my_value'), gdzie my_parameter to nazwa parametru, a my_value to wartość domyślna. Typ parametru jest wnioskowany z wartości domyślnej, więc w tym przypadku byłby ustawiony na typ string.
Następnie, aby odczytać aktualną wartość parametru wykorzystuje się metodę self.get_parameter_value(). Zwracany obiekt jest typu rcl_interfaces.msg.ParameterValue, więc aby uzyskać wartość odwołujemy się do pola value.
Przykładowy szablon kodu:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
class MinimalParam(Node):
def __init__(self):
super().__init__('minimal_param_node')
self.declare_parameter('param_name', 'default_value')
self.my_param = self.get_parameter('param_name').value
print(self.my_param)
def main():
rclpy.init()
node = MinimalParam()
rclpy.spin(node)
if __name__ == '__main__':
main()
Wszystkie dostępne typy parametrów oraz metody ich pozyskiwania opisane są w poniższym linku.
Uruchamianie węzła z parametrami
Węzły mogą być uruchamiane wraz z parametrami, np.:
ros2 run package_name node_name --ros-args -p param_name:=param_valuena przykład:
ros2 run demo_nodes_cpp parameter_blackboard --ros-args -p some_int:=42 -p "a_string:=Hello world" -p "some_lists.some_integers:=[1, 2, 3, 4]" -p "some_lists.some_doubles:=[3.14, 2.718]"Możliwe jest wczytywanie różnych typów parametrów jak i zbiorów (np. list), a także całych plików. Więcej o tym tutaj.
Dane wymieniane pomiędzy węzłami - wiadomości
Wiadomość (ang. message) to struktura danych wymieniana pomiędzy węzłami. Pliki o rozszerzeniu *.msg zawierają deklarację wiadomości. Custom'owe wiadomości przechowywane są w katalogu paczki o nazwie msg. Przykładowe dostępne wiadomości: std_msgs/String.msg, sensor_msgs/Image.msg, trajectory_msgs/msg/JointTrajectory.
Za każdym razem, gdy zamierzasz wykorzystać wiadomość powinieneś zdefiniować ją w zależnościach w pliku package.xml:
<depend>std_msgs</depend>
<depend>sensor_msgs</depend>
<depend>trajectory_msgs</depend>W przypadku, gdy tworzysz własny typ wiadomości, proces przebiega następująco:
- W katalogu głównym paczki utwórz folder o nazwie
msg. - W katalogu
msgutwórz plik o rozszerzeniu*.msg, np.MyMessage.msg. Wewnątrz pliku definiujemy strukturę według schematu:
fieldtype1 fieldname1
fieldtype2 fieldname2
fieldtype3 fieldname3
np.
int32 my_int
string[] my_string_array
lub też z wartościami domyślnymi:
int32 my_int 60
string[] my_string_array ["a","b","c"]
Wszystkie dostępne typy zmiennych są wymienione tutaj.
- W pliku
CMakeLists.txtdodaj następujące linie dla wiadomościMyMessage.msg:
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/MyMessage.msg"
)- W pliku
package.xmldodaj następujące zależności:
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>- Zbuduj środowisko poleceniem
colcon build.
💡 Uwaga, przedstawiony proces zakłada paczkę utworzoną z ament_cmake. W praktyce, można utworzyć osobną paczkę zawierającą jedynie definicje wiadomości, aby móc wykorzystać je w drugiej, Pythonowej, paczce. Kompromisem, pozwalającym tworzyć jednocześnie węzły Pythonowe oraz wiadomości, jest zastosowanie ament_cmake_python. Więcej szczegółów w następującym przykładzie oraz tu.
Symulacja robota mobilnego TurtleBot
Instalacja
Jeśli symulacja jeszcze nie jest zainstalowana na Twoim komputerze, możesz tego dokonać poniższą komendą:
sudo apt install ros-humble-turtlebot3*Konfiguracja
Wybierz model robota poleceniem:
export TURTLEBOT3_MODEL=burgerWskaż ścieżkę do modelu robota poleceniem:
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:`ros2 pkg \
prefix turtlebot3_gazebo \
`/share/turtlebot3_gazebo/models/Uruchamianie:
ros2 launch turtlebot3_gazebo empty_world.launch.pyMożliwe jest również uruchomienie innego symulowanego otoczenia, np. turtlebot3_house.launch.py
Sterowanie robotem:
Sterowanie robotem odbywa się poprzez publikację wiadomości na temacie /cmd_vel.
Możesz to zrobić komendą:
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 2.0"Istnieje również dedykowany węzeł do sterowania TurtleBotem przy pomocy klawiatury. Konieczne jest jednak najpierw ustawienie nazwy robota, jeśli uruchomiłeś nowy terminal:
export TURTLEBOT3_MODEL=burgerNastępnie uruchamiamy węzeł:
ros2 run turtlebot3_teleop teleop_keyboardZadania
Wykonaj następującą próbę. Edytuj przykładowy kod z podpunktu "Tworzenie węzła" komentując linię zawierającą
rclpy.spin(node). Zaobserwuj efekt i zastanów się, czym jaki jest cel tej linii kodu.Bazując na przykładzie z podpunktu "Dodawanie subskrybenta" napisz subskrybenta obrazu z kamery w wersji obiektowej.
Uruchom poniższy kod (możesz zastąpić
camera_node). Korzystając z przedstawionego kodu dokonaj publikacji wiadomościPoint, pamiętaj o tym aby go zaimportować. Publikuj na temacie o nazwie/point. Wykorzystanie timera nie jest konieczne. Dla chętnych, można przetestować w wersji z obrazem z kamery.
#!/usr/bin/env python3
import rclpy # Python Client Library for ROS 2
from rclpy.node import Node # Handles the creation of nodes
from sensor_msgs.msg import Image # Image is the message type
from cv_bridge import CvBridge # ROS2 package to convert between ROS and OpenCV Images
import cv2 # Python OpenCV library
import numpy as np
class MinimalSubscriber(Node):
def __init__(self):
super().__init__('minimal_subscriber')
self.window_name = "camera"
self.subscription = self.create_subscription(Image,'image_raw',self.listener_callback,10)
self.subscription # prevent unused variable warning
self.point = None
def listener_callback(self, image_data):
cv_image = np.zeros((512,700,3), np.uint8)
if(self.point is not None):
cv2.rectangle(cv_image,self.point,(self.point[0]+200,self.point[1]+200),(0,255,0),3)
cv2.imshow(self.window_name, cv_image)
cv2.waitKey(25)
cv2.setMouseCallback(self.window_name, self.draw_rectangle)
def draw_rectangle(self, event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN: # check if mouse event is click
self.point = (x,y)
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()Do kodu z poprzedniego zadania dodaj parametr specyfikujący długość kwadratu (obecnie jest to 200). Wywołaj węzeł ze zmienioną wartością tego parametru.
Napisz węzeł, który cyklicznie będzie publikował wiadomości na temacie
/cmd_veldla robotaTurtleBot. Możesz przyjąć cel, aby robot kręcił się w kółko.Dokonaj rozbudowy programu z poprzedniego zadania. Wykorzystaj publikowany temat
/point, aby robot jechał do przodu (dodania prędkość liniowa w osi x), gdy kliknięty punkt jest powyżej środka ekranu oraz zatrzymywał się w miejscu, gdy jest poniżej. Jako domyślną długość okna przyjmij tą z zadania 3 (512).